 Ukraine
Ukraine
 Uzbekistan
Uzbekistan
 Poland
Poland
 South Africa
South Africa
 Nigeria
Nigeria

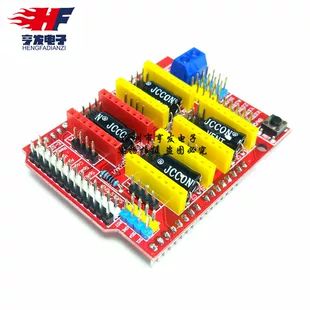







A4988 плата драйвера cnc Shield v3 гравировальный станок плата расширения 3D-принтер
Ссылка на оригинал
Цена
0,46 $
0,46 $
Артикул
602995762557
Характеристики
- марка Хэнфа Электроникс
- сортировать по цвету Плата расширения гравировального станка Shield v3, драйвер шагового двигателя A4988, плата расширения гравировального станка v3 + модуль A4988 4
Продавец jiexiong39348628

- Имя jiexiong39348628
- Магазин 亨发电子 模块 元器件 配单 IC芯片 工具
- Находится 广东深圳
- Отзывов 0
- Позитивных 0
- Оценка доставки 4,84
- Оценка товаров 4,80
- Оценка услуг 4,80
- 100 — 1999 шт 5000$ за шт.
- 2000 — 50119 шт 4000$ за шт.
- 50120+ шт 3000$ за шт.
В наличии 200 шт.
0,46
$
+ Доставка по Китаю
0,43$
Нет в наличии
Проверка + фотоотчёт за 1.5$
Мы проверяем товар и делаем фотоотчёт, чтобы вы могли убедиться, что получите нужный товар без брака и повреждений.
Добавить фотоотчет
Доставка из Китая в Украину, Узбекистан, страны Европы.
Оплачивается по прибытию на склад в Китае
Возврат товара возможен только пока товар находится у нас на складе в Китае. После отправки из Китая товар возврату не подлежит.
Фото и описание товара
资料 https://pan.baidu.com/s/1qXOZ25Q
http://yunpan.taobao.com/s/1QYwbg2DyHH
一、 产品介绍
该扩展板可用作雕刻机,3D打印机等的驱动扩展板,一共有4路步进电机驱动模块的插槽,(注意本板子不包含A4988步进电机驱动模块,需要可在本店另购),可驱动4路不进电机,而每一路步进电机都只需要2个IO口,也就是说,6个IO口就可以很好的管理3个步进电机,使用起来非常的方便,告别传统步进电机操作繁琐。
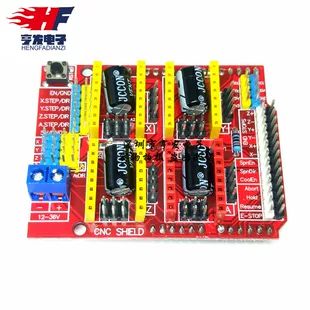
二、Arduino UNO 与模块IO口对应关系介绍
步进电机的基本控制需要的引脚,其他引脚是在雕刻机,或3D打印机的时候才用到的,这里我们不作详解,IO对应如上图。
Arduino UNO----------------------扩展板
8 ------------------------ EN (步进电机驱动使能端,低电平有效)
7 ----------------------- Z.DIR(Z轴的方向控制)
6 ----------------------- Y.DIR(Y轴的方向控制)
5 ----------------------- X.DIR(X轴的方向控制)
4 ---------------------- Z.STEP(Z轴的步进控制)
3 ---------------------- Y.STEP(Y轴的步进控制)
2 ---------------------- X.STEP(X轴的步进控制)
//下面是简单的步进电机控制程序,
#define EN 8 //步进电机使能端,低电平有效
#define X_DIR 5 //X轴 步进电机方向控制
#define Y_DIR 6 //y轴 步进电机方向控制
#define Z_DIR 7 //z轴 步进电机方向控制
#define X_STP 2 //x轴 步进控制
#define Y_STP 3 //y轴 步进控制
#define Z_STP 4 //z轴 步进控制
/*
//函数:step 功能:控制步进电机方向,步数。
//参数:dir 方向控制, dirPin对应步进电机的DIR引脚,stepperPin 对应步进电机的step引脚, steps 步进的步数
//无返回值
*/
void step(boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite(dirPin, dir);
delay(50);
for (int i = 0; i < steps; i++) {
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800);
}
}
void setup(){//将步进电机用到的IO管脚设置成输出
pinMode(X_DIR, OUTPUT); pinMode(X_STP, OUTPUT);
pinMode(Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT);
pinMode(Z_DIR, OUTPUT); pinMode(Z_STP, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(EN, LOW);
}
void loop(){
step(false, X_DIR, X_STP, 200); //X轴电机 反转1圈,200步为一圈
step(false, Y_DIR, Y_STP, 200); //y轴电机 反转1圈,200步为一圈
step(false, Z_DIR, Z_STP, 200); //z轴电机 反转1圈,200步为一圈
delay(1000);
step(true, X_DIR, X_STP, 200); //X轴电机 正转1圈,200步为一圈
step(true, Y_DIR, Y_STP, 200); //y轴电机 正转1圈,200步为一圈
step(true, Z_DIR, Z_STP, 200); //z轴电机 正转1圈,200步为一圈
delay(1000);
}
实验现象:步进电机反转一圈,停顿1秒,再正传一圈,如此循环。
值得注意的是:在接插A4988模块的时候注意不要插反,步进电机接线方式是:
2A ,2B 为一组(红,绿), 1A,1B为一组(蓝,黄)想改变方向,改变其中一组的位置即可,比如2A,与2B交换。
http://yunpan.taobao.com/s/1QYwbg2DyHH


















